本周三件事:看课程视频,阅读 Sutton (1988),作业3(HW3)。
以下为视频截图和笔记:
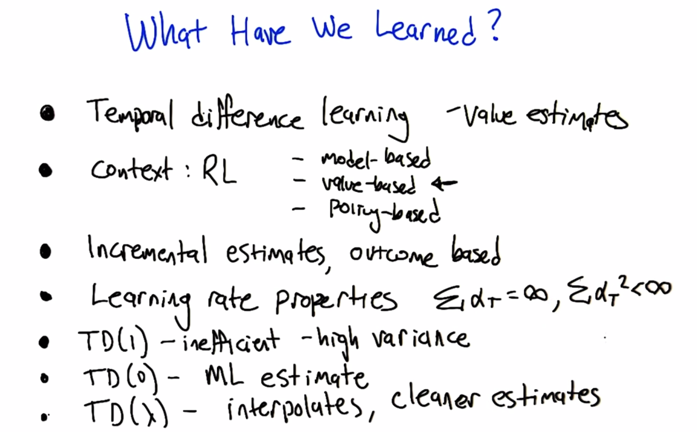
Temporal Difference Learning
- Read Sutton, Read Sutton, Read Sutton. Because the final project was based on it!
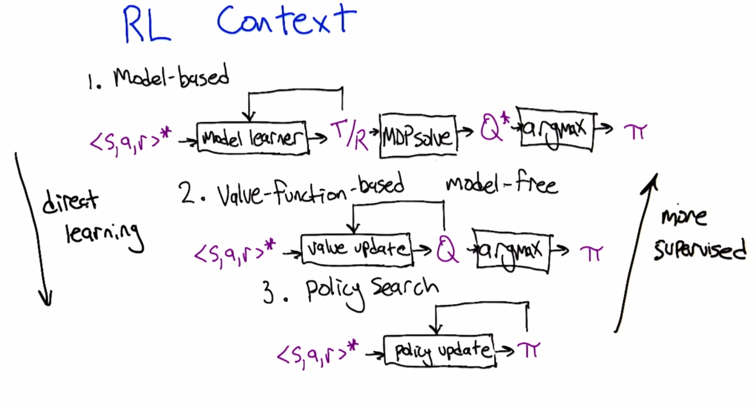
- Model based
- Model free
- Policy search
- Form 1 –> 3: more direct learning
- From 3 –> 1 more supervised
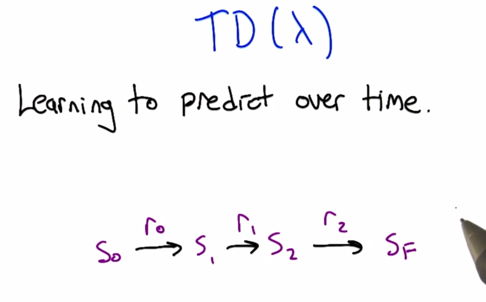
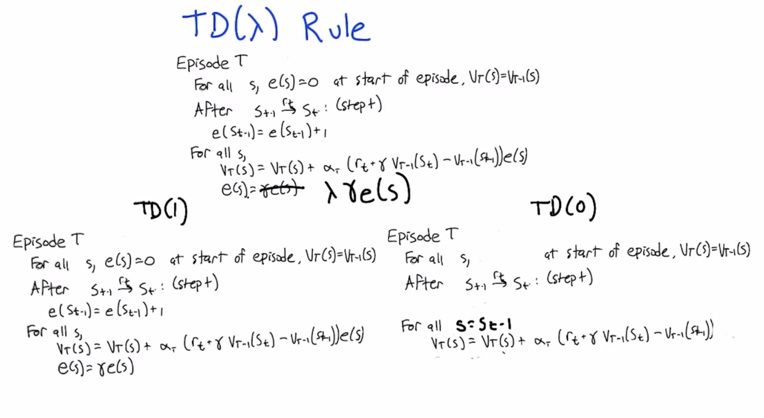
TD-lambda
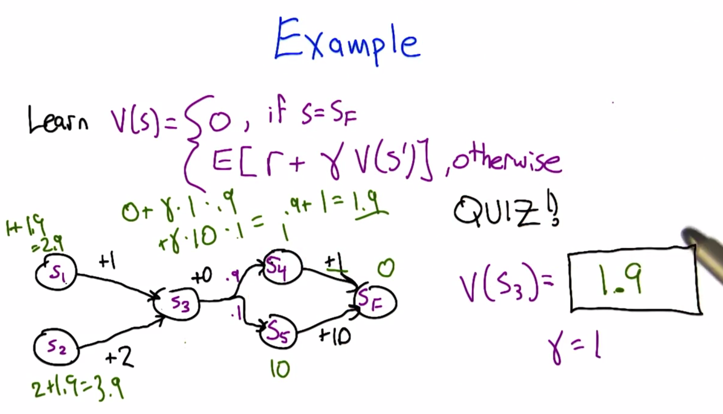
- in this case the model is known, the calculation is easy.
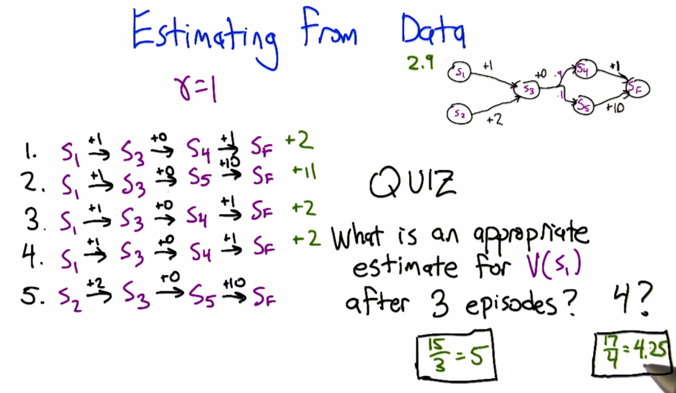
- Remember from the previous lecture, we need to get value from each episode and average over them.
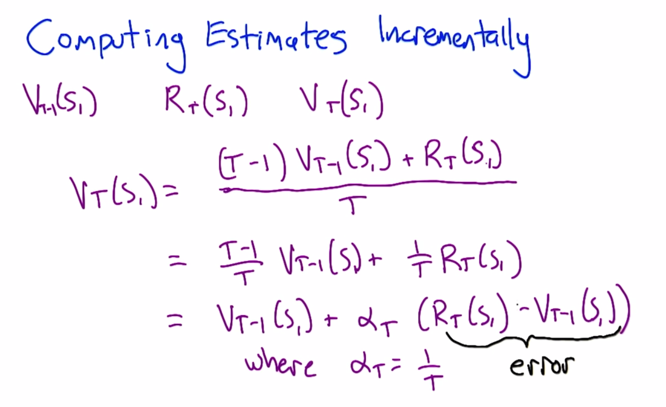
- The rewrite makes the formula looks a lot like neuro-net learning. and alpha is introduced.
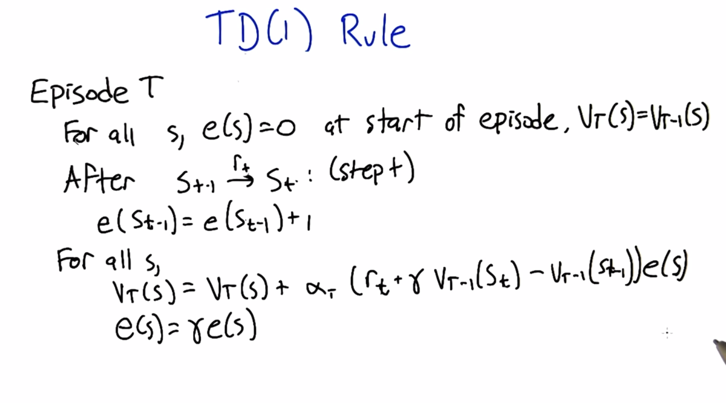
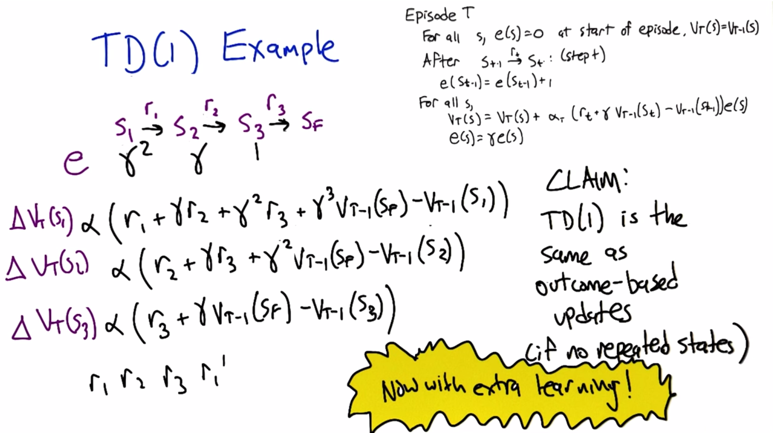
- When no repeated states, the TD(1) is the same as outcome-based updates ( which is see all the rewards in each state and update weights).
- when there is repeated states, extra learning happens.
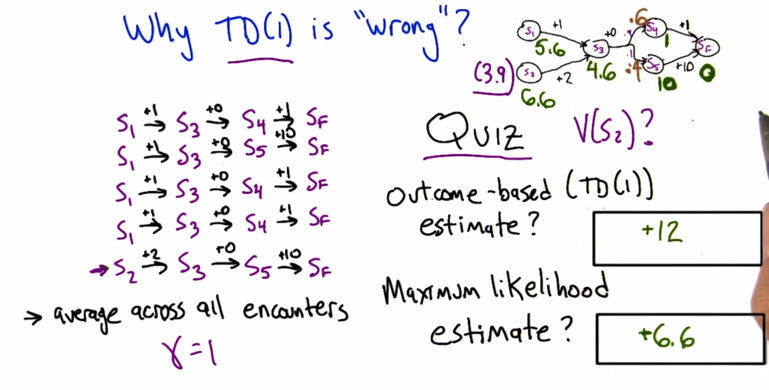
- in case of TD(1) rule, V(s2) can be estimated by average episodes. we only see V(s2) once and the value is 12. Then V(s2) = 12
- in case of Maximum likelihood estimates, we have to kind of learn the transition from data. e.g. for the first 5 episodes, we saw s3->s4 3 times and s3 -> s5 2 times. So the transition probability can be extracted from data as 0.6 and 0.4 respectively.
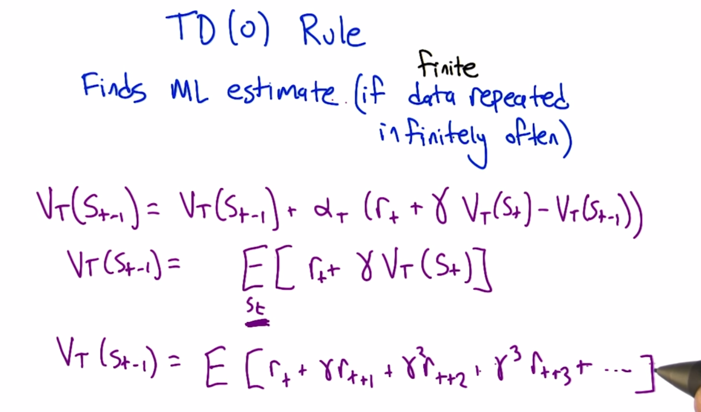
- First of all, if we have infinite data, TD(1) will also do the right thing.
- When we have finite data, we can repeatedly infinitely sample the data to figure out all the ML. This is what TD(0) do.
K-Step Estimators
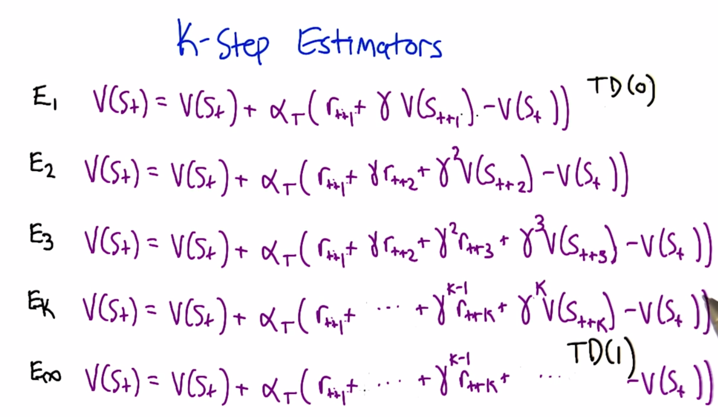
- E1 is one-step estimator (one-step look up) TD(0)
- E2 is two-step estimator, and Ek is k-step lookup.
- When K goes to infinity, we got TD(1)
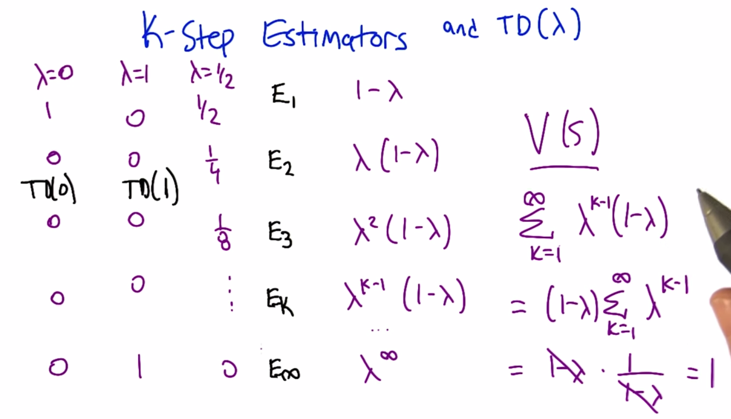
TD-lambda can be seen as weighted combination of K-step estimators. the weight factor are λk(1-λ).
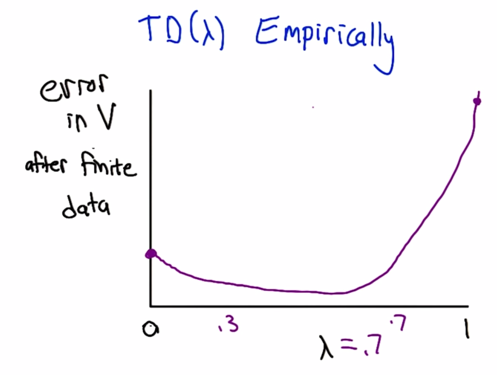
The best performed lambda is typically not TD(0), but some λ in between 0 and 1.
2015-09-5 初稿
2015-12-03 reviewed and revised until the "Connecting TD(0) and TD(1)" slides