本周三件事:看课程视频 Convergence. 读 Littman and Szepesvari (1996), 作业四。
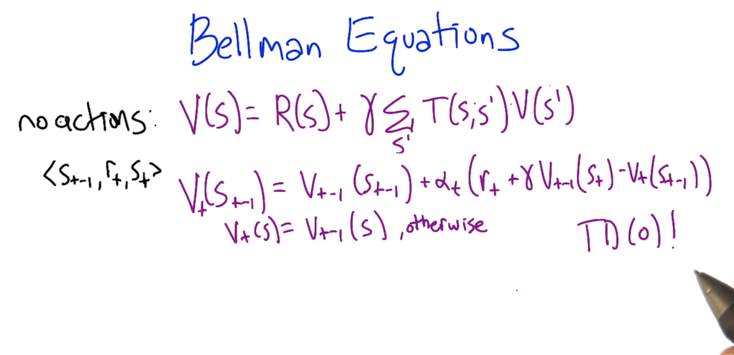
- no actions by learner. The value function is that value equals reward R(s) plus discounted expected value of the next state. (T(s, s’) is transision function.
- The new estimated value function for the state the learner just left is TD(0).
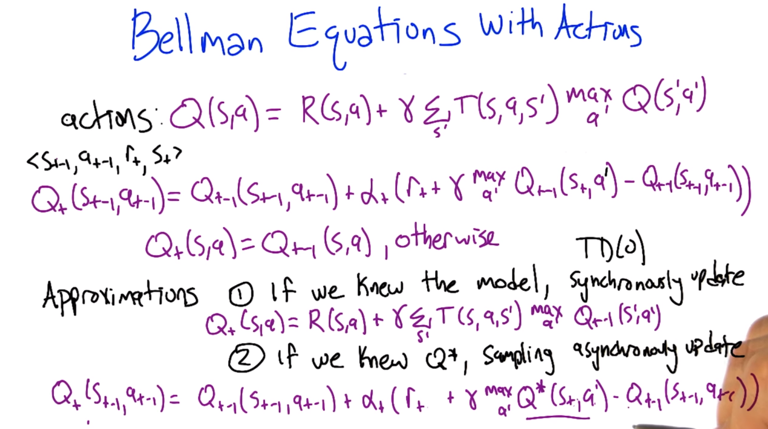
Q function is used to estimate the value at current state, take a action then get a reward and ended up in a new state < st-1, at-1,rt,st >. The Q updating rule takes care of two approximations: 1) if model is known, it can be used to update Q; 2) if Q* is known, it can also be used to update Q.
And both will converge.
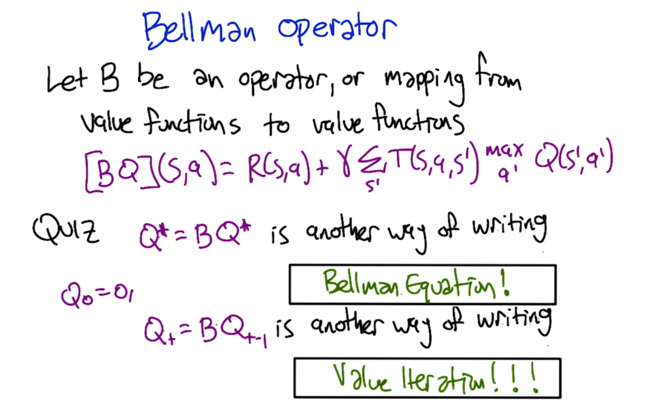
- See value iteration here
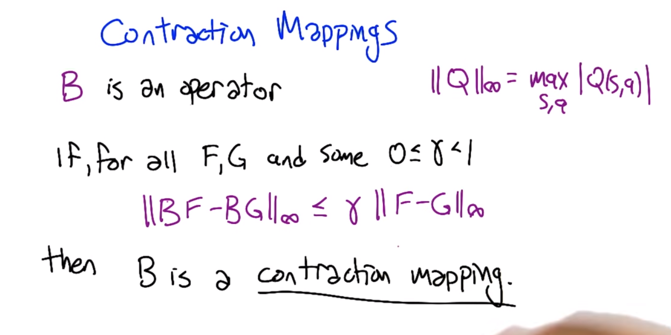
- Practically, if B is multiplying a number in [0,1), B is contraction mapping.
-
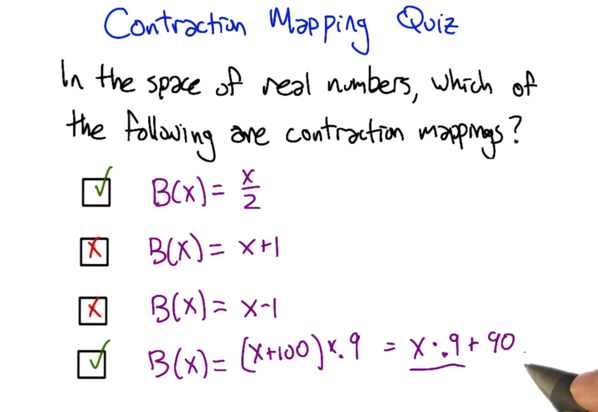
take the first option for example: B(x) - B(y) = x/2 - y/2 =1/2 x - y , so there exists γ >=1/2 makes B(x) - B(y) <=γ x - y . So B(x) = x/2 is a contraction mapping.
-
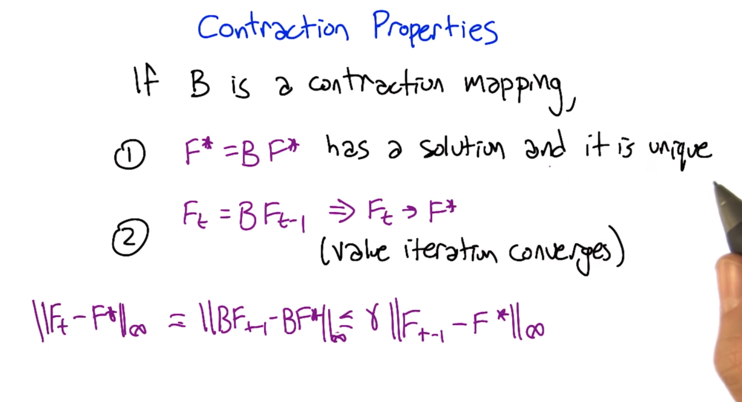
① and ② are true, so that BFt-1 = Ft, Ft will converge at F* through value iteration.
-
If there is two fix point, G* and F*, Putting them into the B operator will not change the distance of them because both of them are fixed, and this violates the definition of B.
-
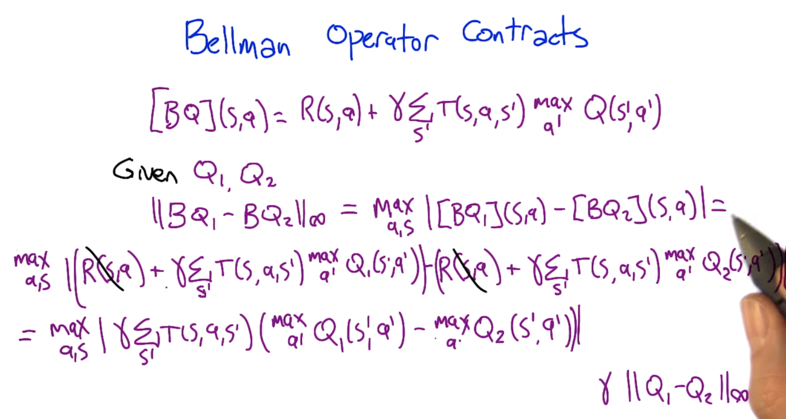
Applying B operator to Bellman equation and unpacking BQ1 - BQ2 ∞. - Not combining the max a’ because the a’ are not the same in Q1 and Q2
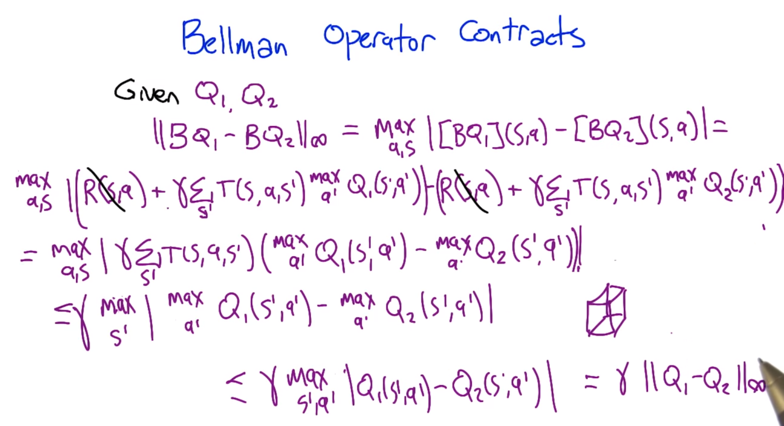
- stop here, first, will go back. that’s call this the unfinished proof.
-
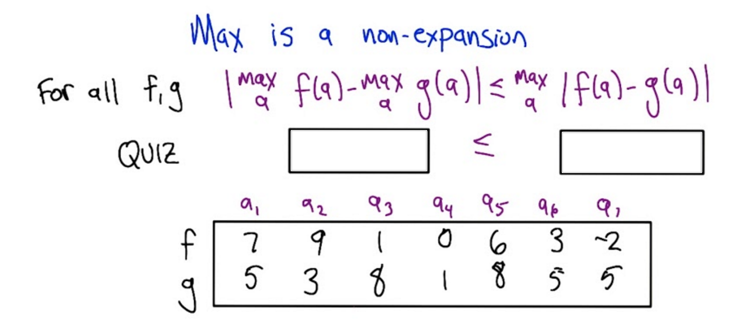
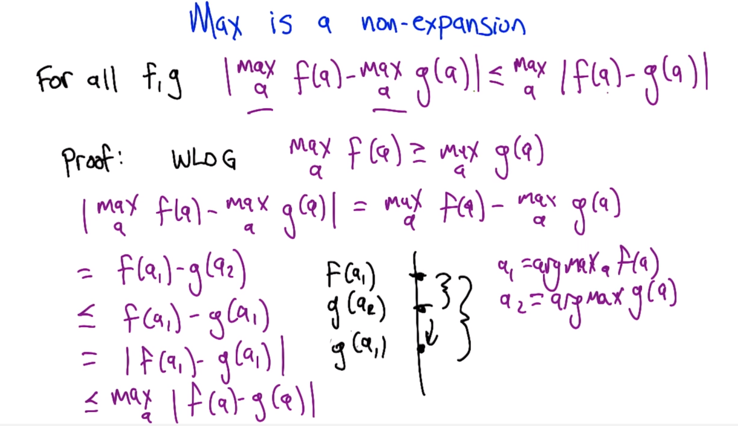
Max is non-expansion: maxf(a) - maxg(a) <= max (f(a) -g(a) . Using this
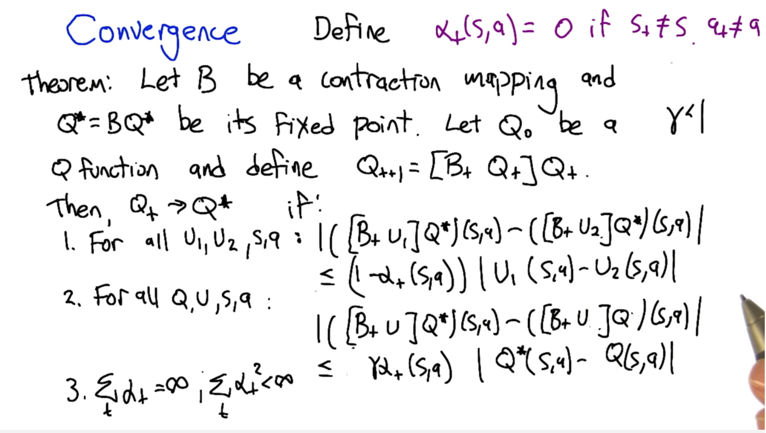
The three properties need to be true for Qt to converge to Q*. and they are true
So, Q-learning converges.
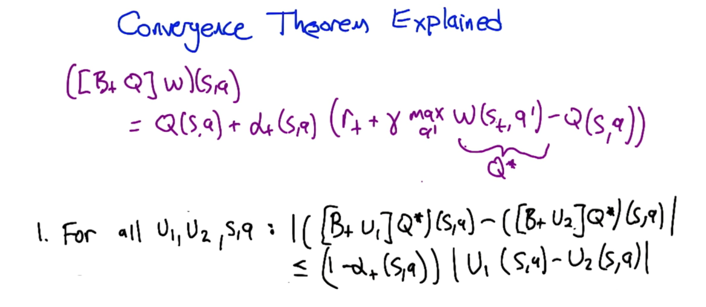
Bt is the operator we are going to update Q at t time step. Q(s,a) is the Q function value of the state we just left and Q function w is the Q value of the state we just arrive. In regular Q Learning update, Q and w are the same, here we separated them in the theorem.
So, rule number one is saying if we know the Q* and use the updating rule (in pink) to update the Q function, the expected value of the one-step look ahead (w) can be calculated and the stochasticity will be averaged out.
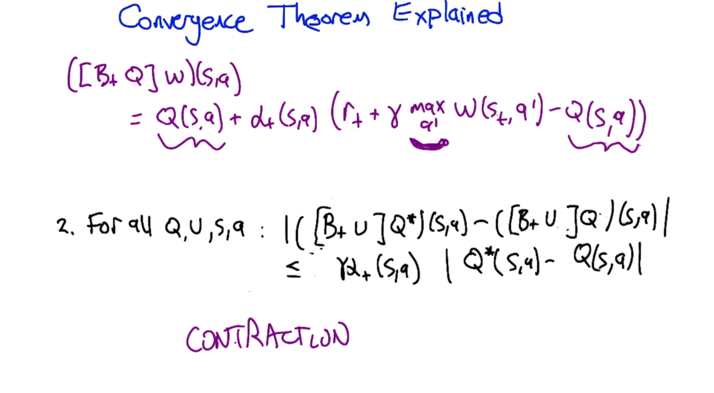
If we hold the Q(s,a) fixed and only varies the way we calculate the one-step look ahead, the distance between the Q* and Q can only get closer with each update.
The third condition is the learning rate condition. which is needed for Bellman equation.
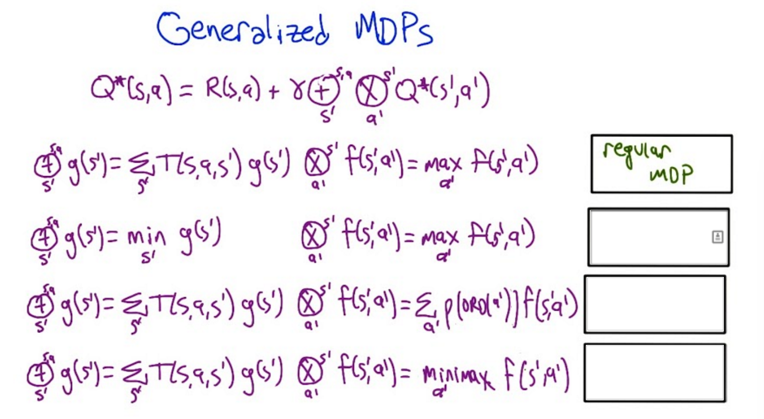
- the take home messages are, these generalized MDPs all converges.
- so the correct answers are: (from top to bottom) worst possible decision, not-optimal decision, two agent competing decision making (the zero-sum game).
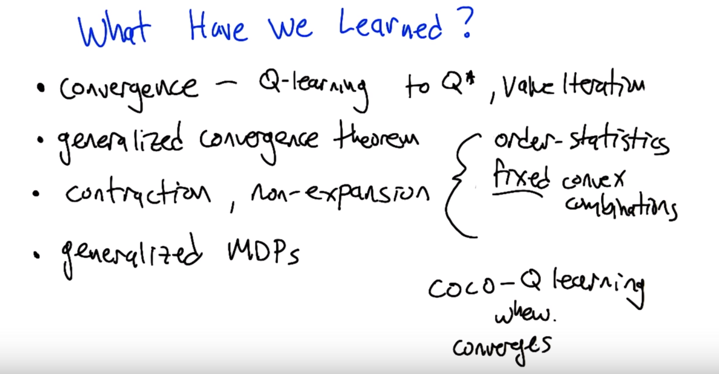
Generalized MDP can be seen as redefine fix point. Contraction might be something like “收敛” in Chinese. Q-learning converges to Q*. Generalized Convergence theorem uses two Q-functions to prove the convergence of Bellman Equation.