This week
- should watch CCC.
- The readings are: Zeibart et al. (2008). Babes et al. (2011). Griffith et al (2013). Cederborg et al (2015). Roberts (2006). Bhat (2007).

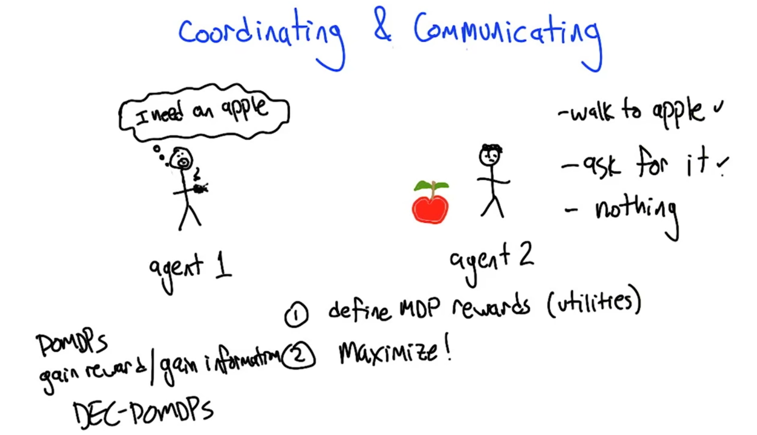
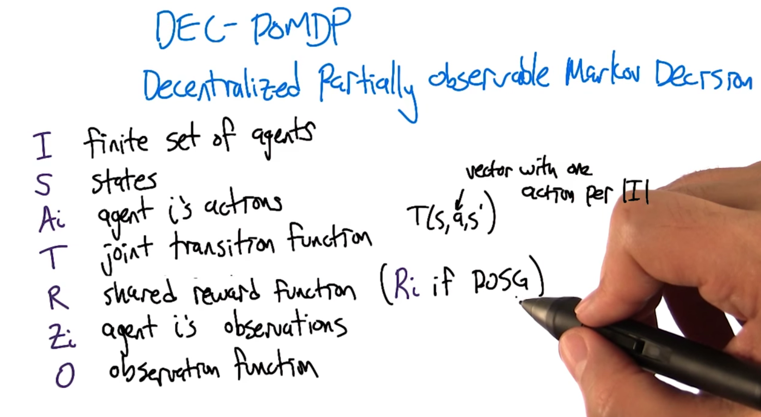
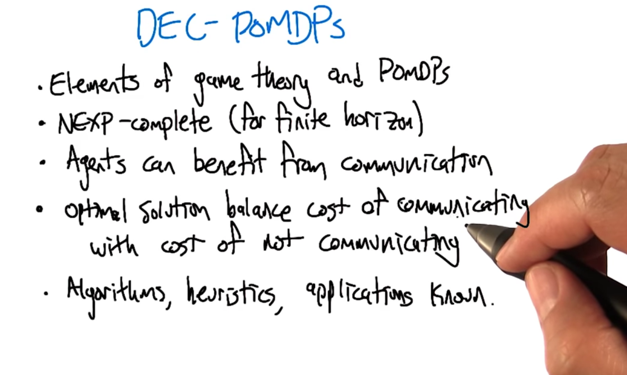
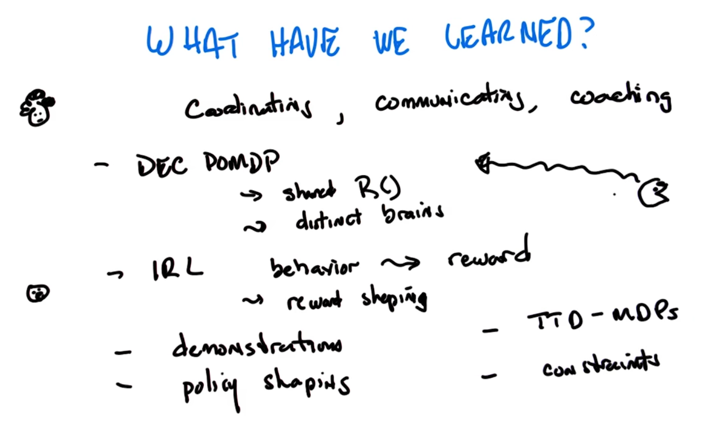
- Dec-POMDP has some perspectives of game theory and MDP
- Multiple agent working on getting a common reward. (if the rewards are separated for all the agents, then it’s a POSG partially observable stochastic game)
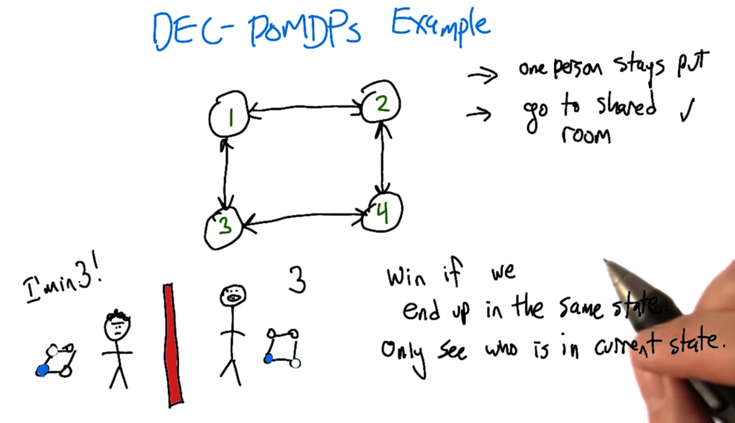
- two agents, they know where they are but don’t know the other’s position. when the two are in the same room, they win.
- Strategy: go to a shared room. But my knowledge of my current position could be wrong ( partially observable world).
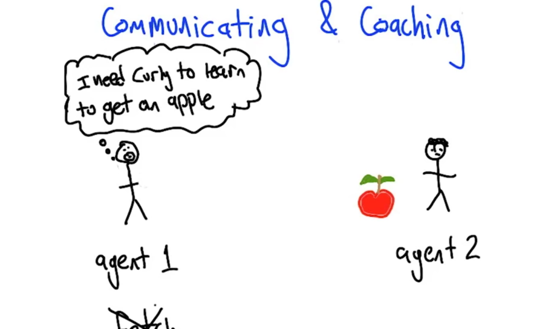
- agent 1 wants to set up some kind of reward function to move agent to do something (e.g. get the apple for me).
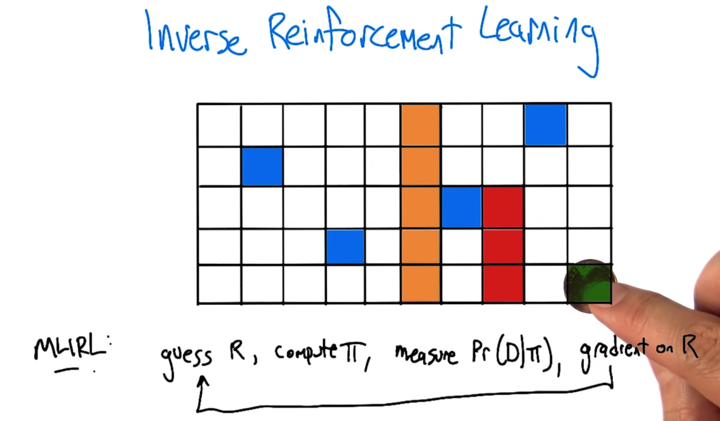
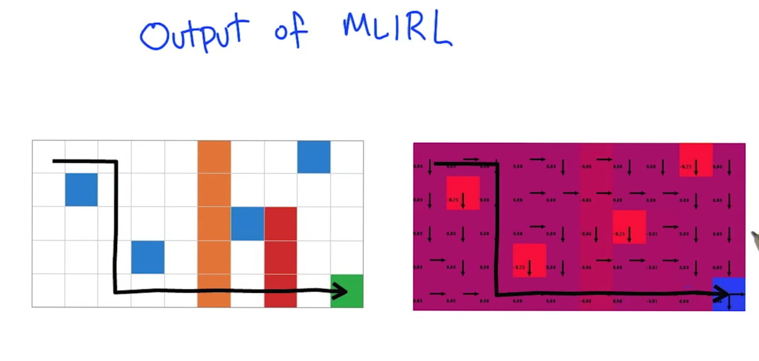
Inverse Reinforcement Learning
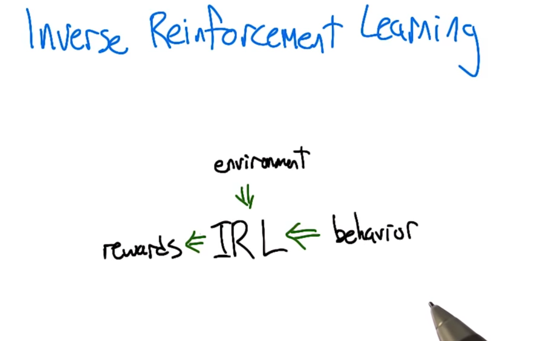
- Inverse Reinforcement Learning: the agent experience the environment and a set a behavior and then generate a reward function based on the inputs.
Policy Shaping
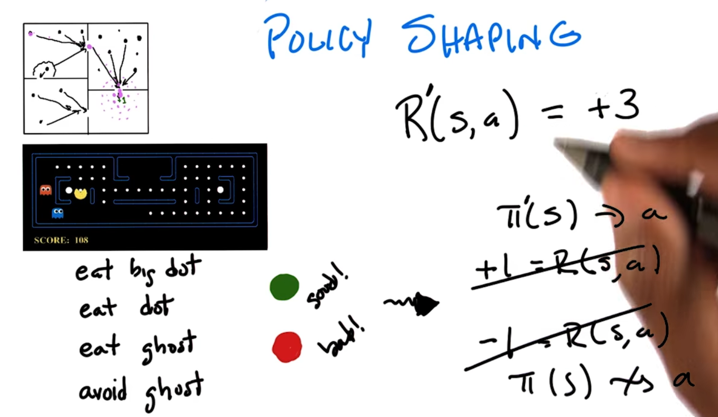
- if a human is giving feedback (commentary) about weather the agent’s action is good or bad, s/he is doing policy shaping.
- policy shaping could be realized by reward shaping which is replace reward of an action with a new reward?
- Agent need a mechanism to learn from the environment and the commentary to decide what policy to take (not just listening to the commentary, cause the commentary might not be always right).
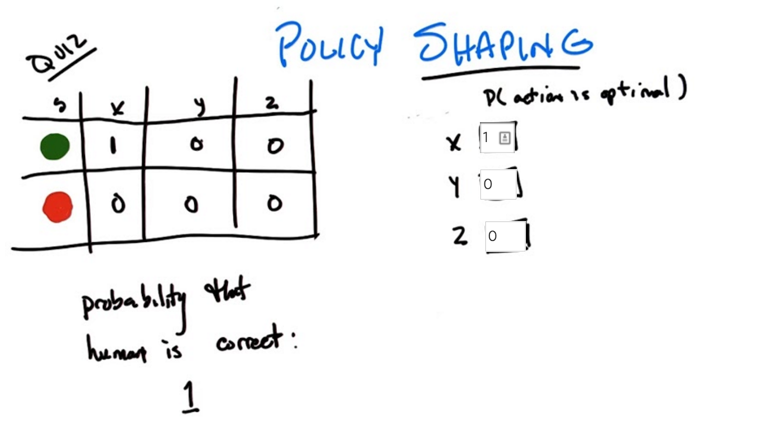
- If human is alway correct, given the feedback, what’s the probability that the action (x, y, or z) is optimal?
- answers in the slides above.
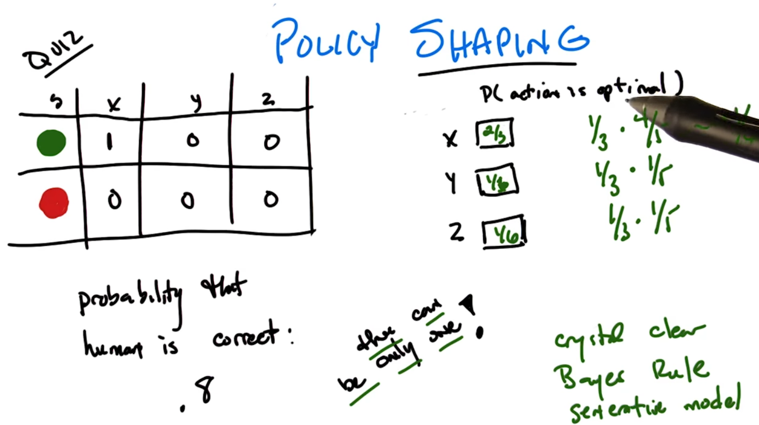
- what if human is 0.8 probability of right?
- counting method:
- saying x is optimal is liking saying y and z is not optimal.
- since human is 0.8 correct, then x, y, z being optimal is 0.8, 0.2, 0.2.
- normalize the numbers above, will get 2/3, 1/6, 1/6.
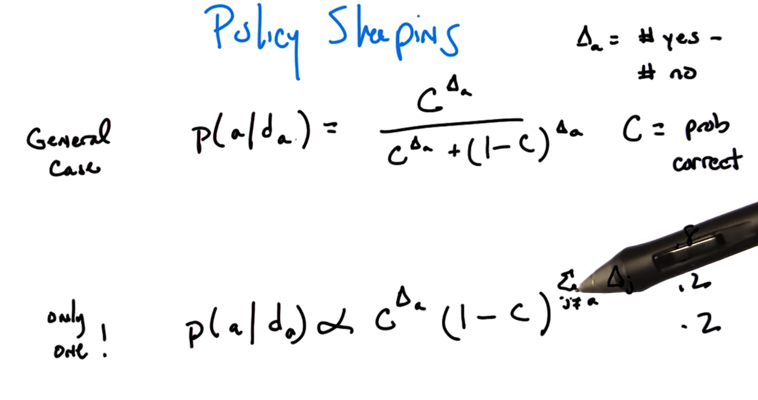
- Δa is coming from data of action a (da). C is the probability of correct of the people giving commentary.
- The formula above give the method of calculating probability of action a is optimal.
- Note: the final probability will need to be normalized against the probabilities of other actions.
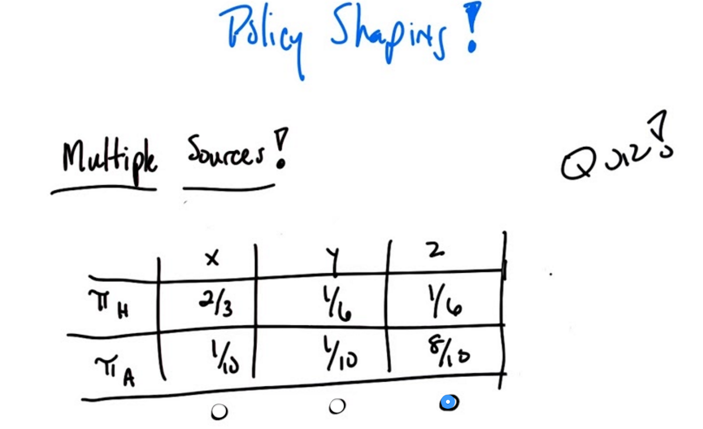
- in the policy shaping case, information are coming from multiple sources.
- E.g. πa and πH are policy info from agent exploring the world and human giving feedback.
- Some algorithm decrease the importance of πH as time goes. One need to know that πa already incorporated the information of human uncertainty (C).
-
the way to combine the two sources is to calculate the probability that the two policy will agree: aopt=argmaxa p(a π1) * p(a π2). - in the quiz xopt = 1/15, yopt=1/60,aopt=2/15. So we should choose z as optimal.
Drama Management
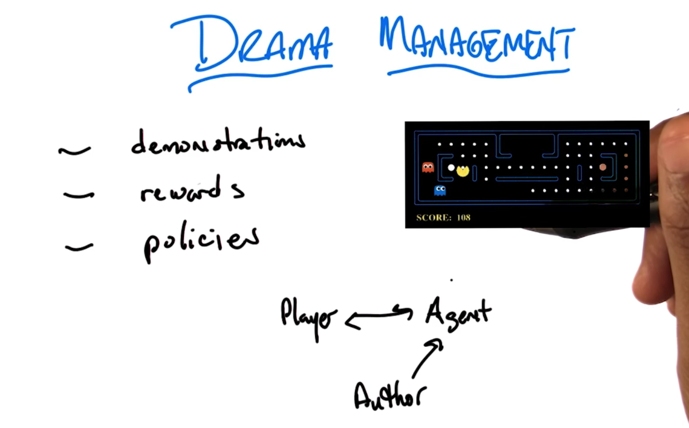
- the way a human can communicate to an agent
- demonstration: show the agent what’s the correct action (inverse RL)
- reward shaping: giving reward for agent’s actions
- policy shaping: commentary on the agent’s actions
- author convey his intent to the agent so the agent can
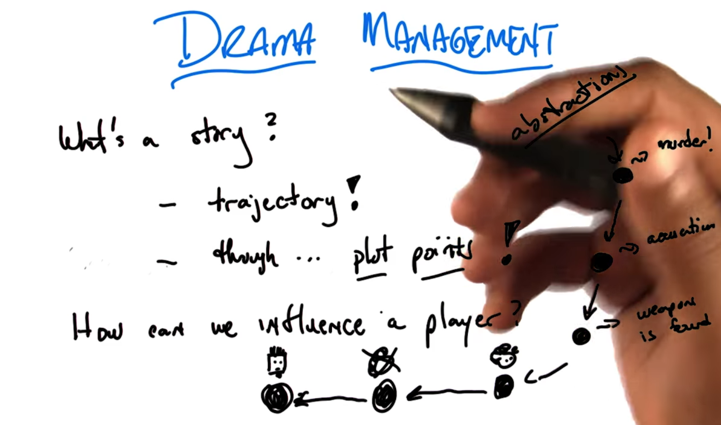
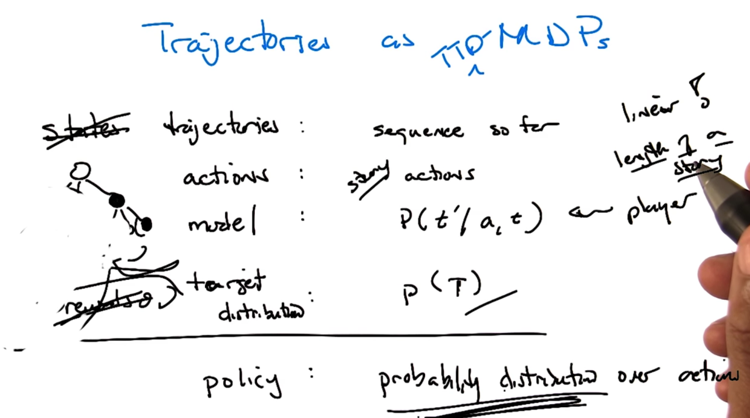
- story can be defined as a trajectory through plot points
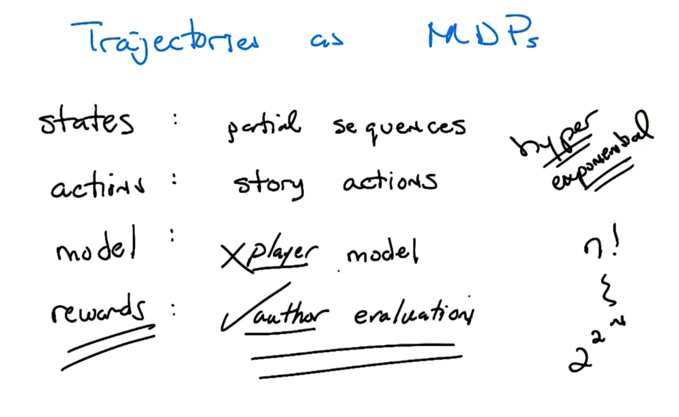
- above a some mapping of MDP elements to trajectory MDP elements
- Problems
- large number of sequence of states (hyper exponential)
- Since MDP will maximize rewards, treating story as an MDP will only make the author happy and force the player to experience the story.
-
p(t’ a,t) is the probability that the player at trajectory t and take action a then ended up in trajectory t’. P(T) is a target distribution. - the action is not player’s action but the story action
- the optimal policy is the policy that will lead to the targeted trajectory distribution P(T)
- the calculation time is linear and dependent on the length of the story.
what have we learned
2015-11-18 初稿 完成