- Course Preview
- Block Problem Revisited
- Painting a Ceiling
- Represent the Painting a ceiling problem.
- States
- Operators
- Planning and state spaces:
Course Preview
Block Problem Revisited
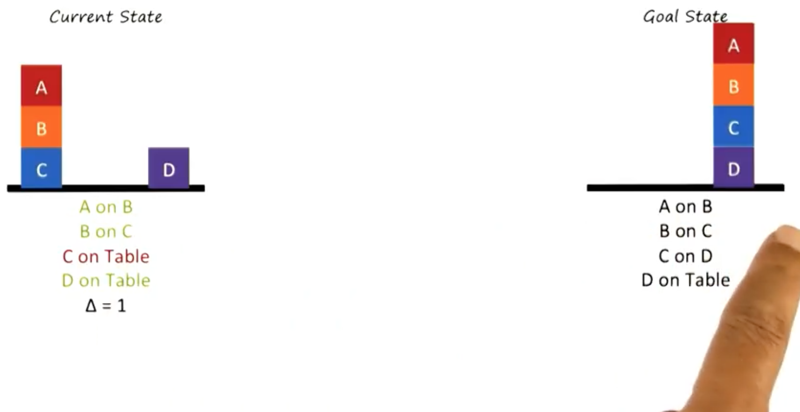
前情提要:之前用来解决这个问题的方法是?
Painting a Ceiling
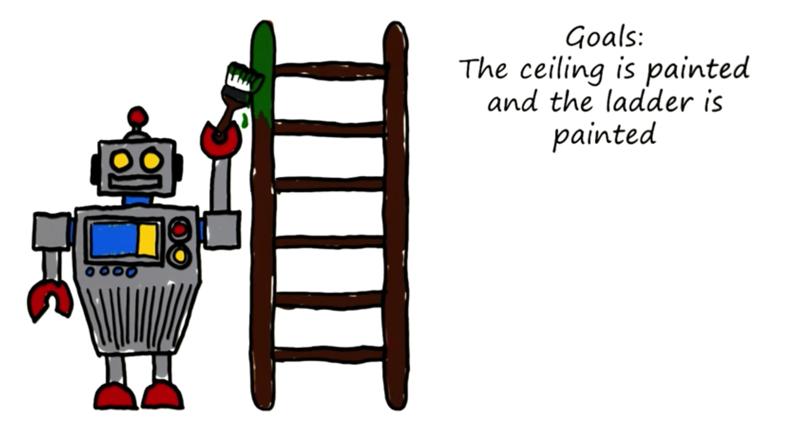
- the problem that the robot is facing is to paint the ceiling and the ladder.
- human will quickly figure out s/he should paint the ceiling witht he help of the ladder and then paint the ladder.
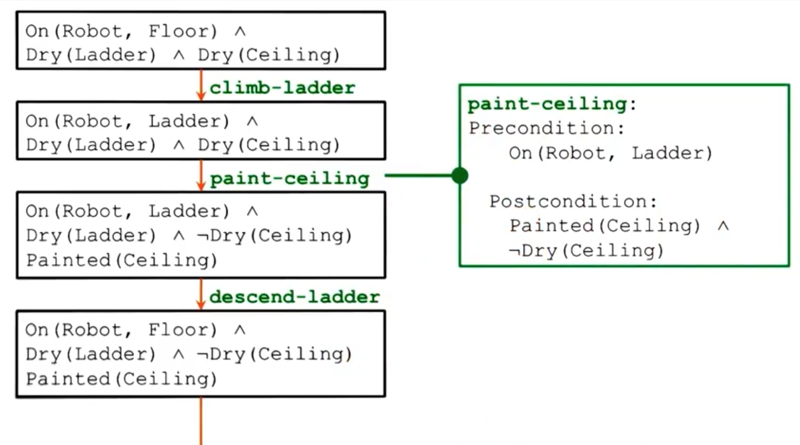
Represent the Painting a ceiling problem.
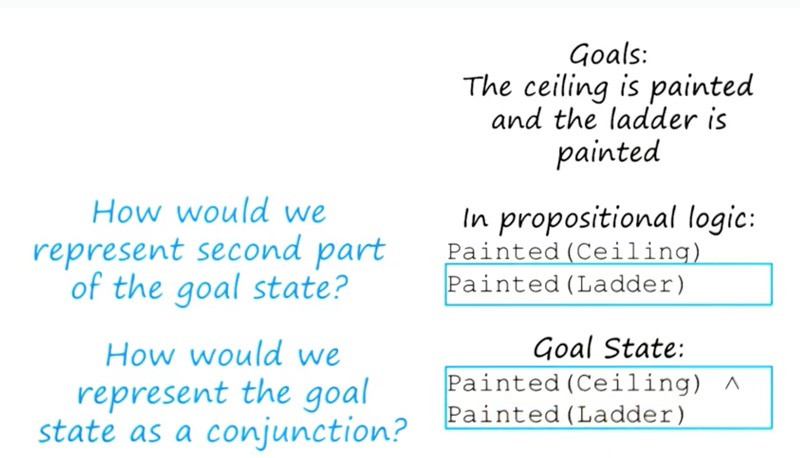
States
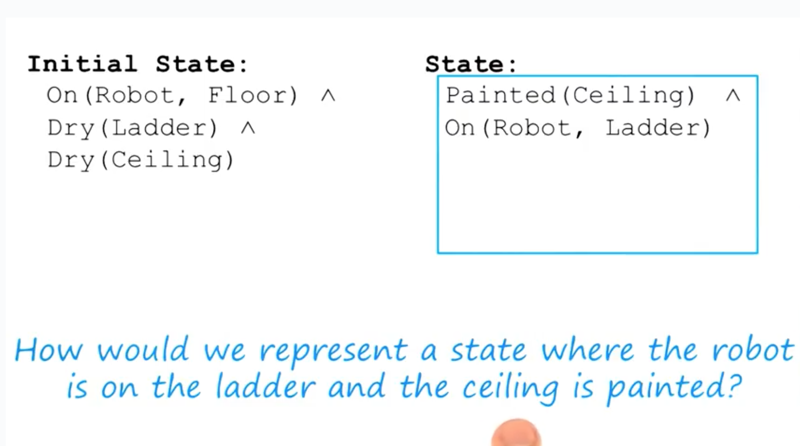
- initial state
- intermediate state. Note, there is no description of the ladder, so there should be no ladder mentioned in the logic.
Operators
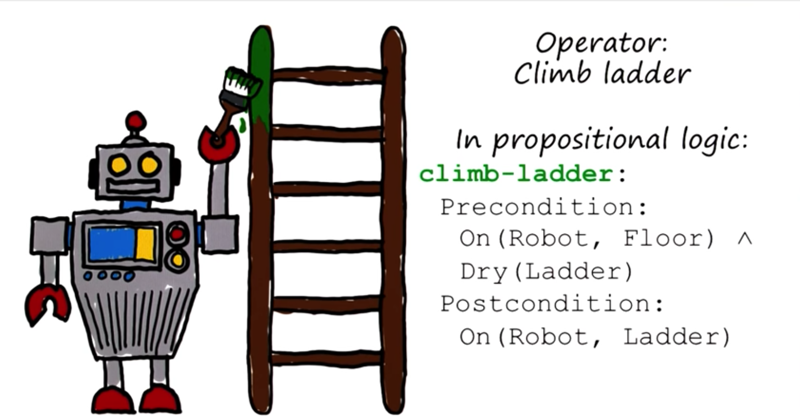
- the operator will be carried out if and only if the precondition exists.
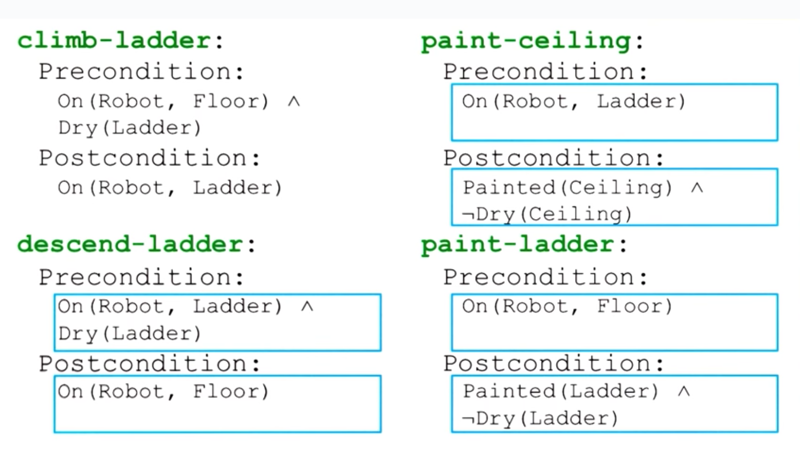
- the not Dry state is interesting .
Planning and state spaces:
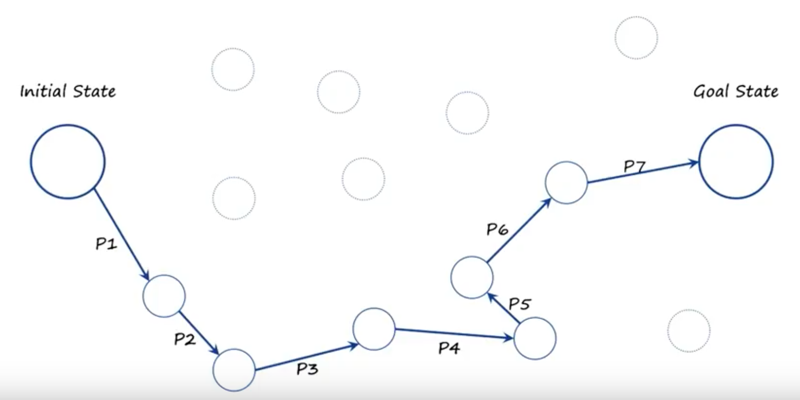
- in each state, different operators can generate many possible states and the state space could explode very quickly.
- How to do operator selection?
- how to figure out the route (with the guidance of the goal state)
- control knowledge from the goal state.
- Since operator selection can be affected by goal setting, and the operator selection actually control the state selection.
- Operator selection is very much like action selection
- a plan is like states with operators.